3.System Framework
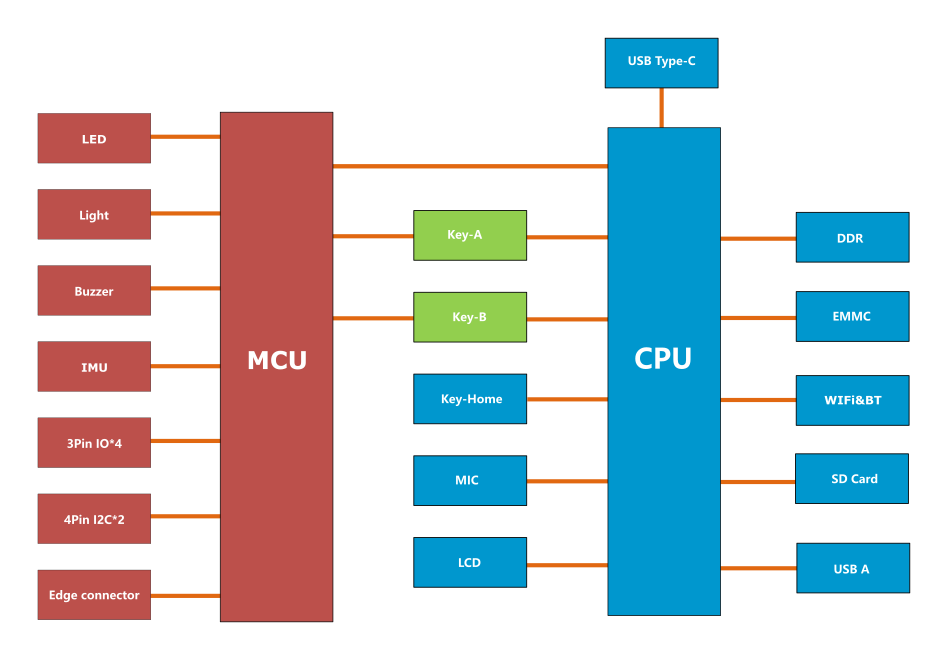
The UNIHIKER adopts a dual-processor architecture, with a PC and microcontroller being responsible for different tasks. The CPU, memory, hard disk, screen, and peripherals make up a computer system that runs on the Linux operating system. The microcontroller is responsible for controlling the onboard components and external IO ports, while the computer system controls the co-processor through the pinpong library.