2.I2C(Inter Integrated Circuit)
Description¶
I2C (Inter Integrated Circuit) bus is a two-wire serial bus, used to connect microcontrollers and their peripheral devices. It is commonly used for master-slave communication between the master controller and slave devices, and is used in small data volume situations with short transmission distance and only one master at any time. Perform bidirectional transmission between the CPU and the controlled IC, as well as between ICs. IIC has only two buses: one is the bidirectional serial data line SDA, and the other is the serial clock line SCL:
- SDA (Serial Data) is a data line, D represents Data, and Send Data is used to transmit data.
- SCL (Serial clock line) is the clock line, and C represents Clock, which controls the timing of data transmission.
All serial data SDA connected to I2C bus devices are connected to the SDA of the bus, and the clock lines SCL of each device are connected to the SCL of the bus. Each device on the I2C bus has its own unique address to ensure the accuracy of access between different devices.
Tips: The principle of I2C communication can be referred to in this video: click here
Common functions¶
1.1 I2C( )¶
Object = I2C(bus_num=value) | |
|---|---|
| Description | Set the port of the I2C. |
| Syntax | Object = I2C(bus_num=value) |
| Parameters | value: Create an I2C object on a specific port. |
| Return | I2C Object. |
1.2 writeto( )¶
| Syntax | Object.writeto(address,data) |
|---|---|
| Description | Write data to the address. |
| Parameters | address: The address where data is written. |
| **data:**The data to be written. | |
| Return | **None |
1.3 readfrom( )¶
| Syntax | Object.readfrom(address,num) |
|---|---|
| Description | Read data from the specified address. |
| Parameters | address: The address for reading data. |
| num: Read the length of the data. | |
| Return | The result data read. |
1.4 readfrom_mem( )¶
| Syntax | Object.readfrom_mem(address,num1,num2) |
|---|---|
| Description | Read data from registers. |
| Parameters | address: The address for reading data. |
| num1: Register number. | |
| num2: Read the length of the data. | |
| Return | The data read. |
1.5 writeto_mem( )¶
| Syntax | Object.writeto_mem(address,num,data) |
|---|---|
| Description | Write data to the register. |
| Parameters | address: The address for reading data. |
| num1: Register number. | |
| data: Write data. | |
| Return | **None |
1.6 I2C Scan¶
- After upgrading the Pinpong library to version 0.6.0 and above, you can use the commonly used i2cdetect tool on Linux for i2c scanning.
- The i2c interface number on the UNIHIKER is the fourth one, so the method to scan the address is:
i2cdetect -y 4
root@unihiker:~# i2cdetect -y 4
0 1 2 3 4 5 6 7 8 9 a b c d e f
00: -- -- -- -- -- -- -- -- -- -- -- -- --
10: -- -- -- -- -- -- -- -- -- -- -- -- -- -- -- --
20: -- -- -- -- -- -- -- -- -- -- -- -- -- -- -- --
30: -- -- -- -- -- -- -- -- -- -- -- -- 3c -- -- --
40: 40 -- -- -- -- -- -- -- -- -- -- -- -- -- -- --
50: -- -- -- -- -- -- -- -- -- -- -- -- -- -- -- --
60: -- -- -- -- -- -- -- -- -- -- -- -- -- -- -- --
70: -- -- -- -- -- -- -- --
root@unihiker:~#
Example Description¶
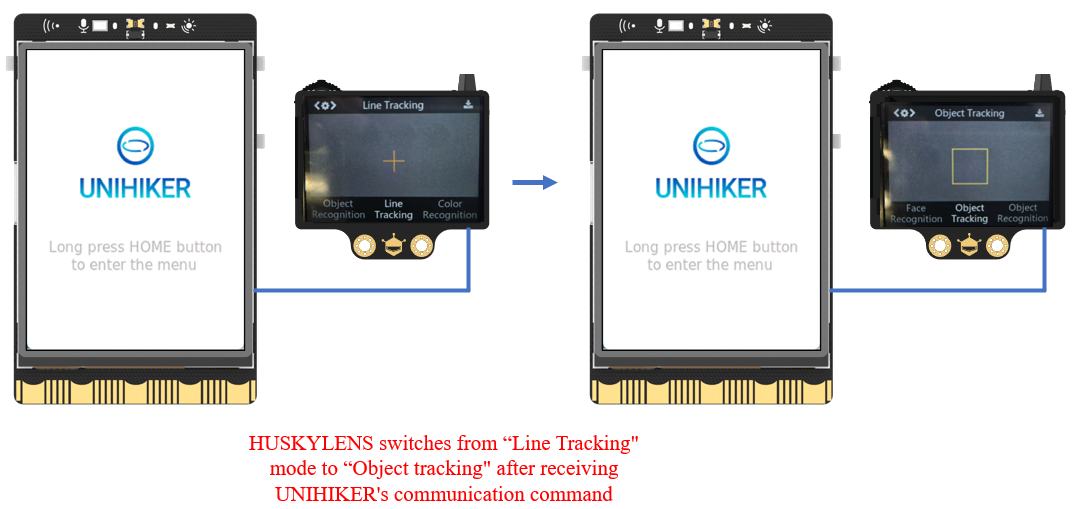
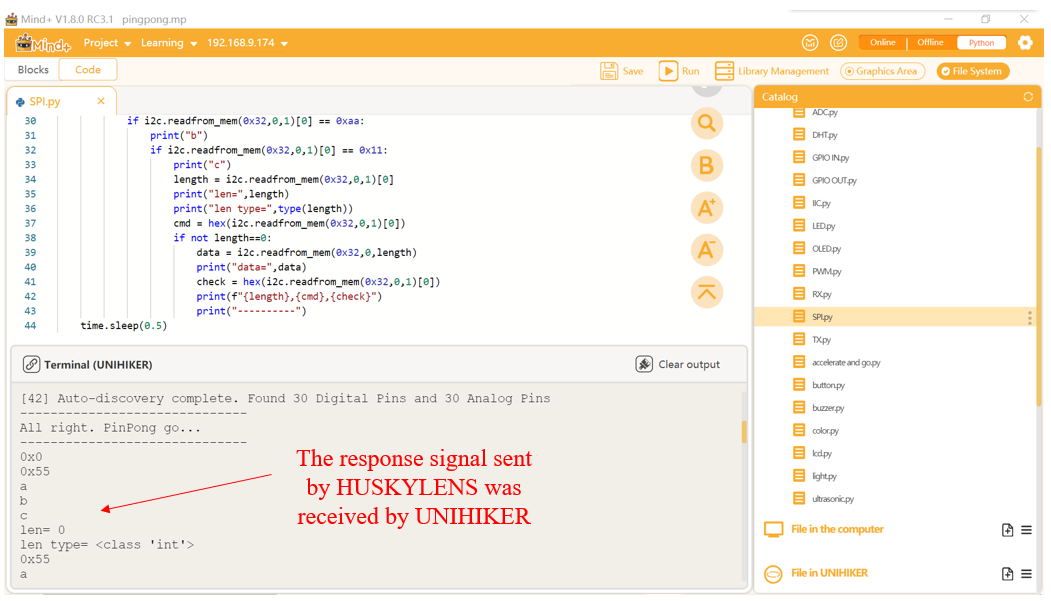
By utilizing the characteristics of I2C communication, data commands are sent to HUSKYLENS through UNIHIKER, which can control HUSKYLENS to switch recognition modes. After successful switching, HUSKYLENS sends communication data indicating successful mode switching to UNIHIKER. When UNIHIKER receives a data frame starting with "0x55, 0xaa, 0x11", it indicates that the response signal sent by HUSKYLENS has been successfully received by UNIHIKER.
Note: You first need to adjust the Protocol Type to I2C in the General Settings of HUSKYLENS.
Tips: For more communication instructions, please refer to: HUSKYLENS Protocol
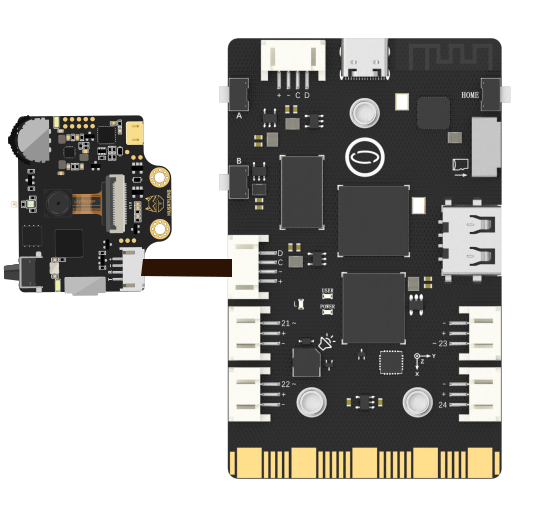
Hardware Required¶
Example Code¶
# -*- coding: utf-8 -*-
# Experimental effect: Display of I2C communication protocol control
# Wiring: Connect an HUSKYLENS to UNIHIKER, I2C address is 0x32
import time
from pinpong.board import Board,I2C
Board("UNIHIKER").begin()
i2c = I2C()
# I2c=I2C (bus_num=0)
# i2c.writeto(0x33,[1,2,3,4,5]) # Write [1,2,3,4,5] to i2c device
# i2c.readfrom(0x33,6) # Read 6 data from i2c device
# i2c.readfrom_mem(0x33,2,6) # Read 6 data from register 2 of i2c device
# i2c.writeto_mem(0x33,2,[1,2,3,4,5]) # Write [1,2,3,4,5] to register 2 of the i2c device
# Switch algorithm to object tracking. After successful sending, switch algorithm and return COMMAND-RETURN_OK
data_ls=[0x55,0xAA,0x11,0x02,0x2D,0x01,0x00,0x40] # data
while True:
i2c.writeto(0x32,data_ls) # Wirte data
read_data = i2c.readfrom_mem(0x32,0,1) # Read data
if read_data is not None and len(read_data) > 0: # Format the received data
print(hex(read_data[0]))
if read_data[0] == 0x55:
print("rec: 0x55")
if i2c.readfrom_mem(0x32,0,1)[0] == 0xaa:
print("rec: 0xaa")
if i2c.readfrom_mem(0x32,0,1)[0] == 0x11:
print("rec: 0x11")
length = i2c.readfrom_mem(0x32,0,1)[0]
print("len=",length)
print("len type=",type(length))
cmd = hex(i2c.readfrom_mem(0x32,0,1)[0])
if not length==0:
data = i2c.readfrom_mem(0x32,0,length)
print("data=",data)
check = hex(i2c.readfrom_mem(0x32,0,1)[0])
print(f"{length},{cmd},{check}")
print("----------")
time.sleep(0.5)