4.Accelerometer and Gyroscope
Description¶
The back panel of the UNIHIKER is equipped with a 6-axis accelerometer-gyroscope sensor, which can read the X, Y, and Z values of acceleration individually, as well as the total strength in X, Y, and Z directions, and the X, Y, and Z values of the gyroscope.
Syntax¶
- Accelerometer: accelerometer.get_x() accelerometer.get_y() accelerometer.get_z() accelerometer.get_x()
- Gyroscope: gyroscope.get_x() gyroscope.get_y() gyroscope.get_z()
Parameters¶
**None
Return¶
Accelerometer values and gyroscope values
Example Description¶
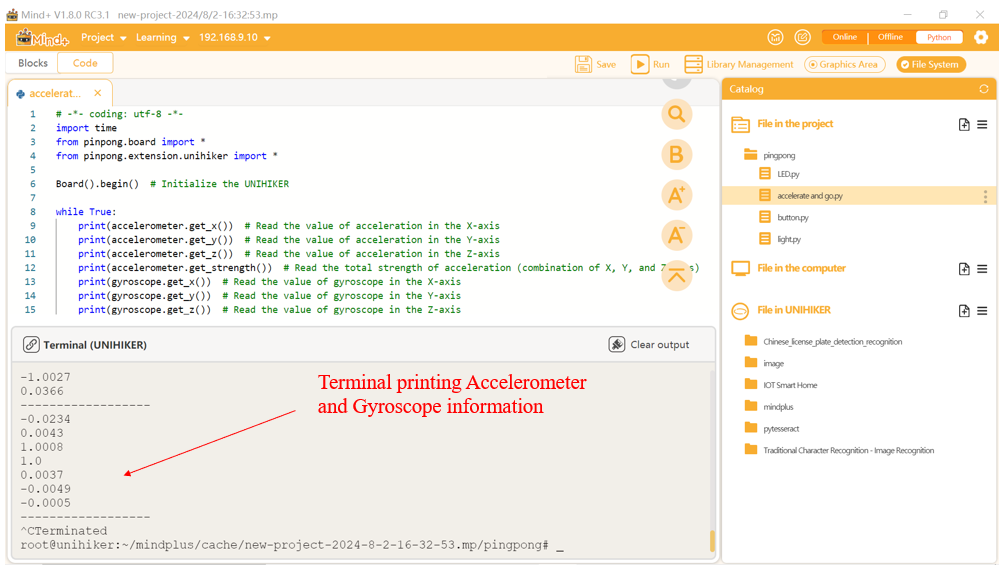
The code below can be used to sense changes in value through the Accelerometer and Gyroscope sensor on UNIHIKER.
Hardware Required¶
Example Code¶
# -*- coding: utf-8 -*-
import time
from pinpong.board import *
from pinpong.extension.unihiker import *
Board().begin() # Initialize the UNIHIKER
while True:
print(accelerometer.get_x()) # Read the value of acceleration in the X-axis
print(accelerometer.get_y()) # Read the value of acceleration in the Y-axis
print(accelerometer.get_z()) # Read the value of acceleration in the Z-axis
print(accelerometer.get_strength()) # Read the total strength of acceleration (combination of X, Y, and Z axes)
print(gyroscope.get_x()) # Read the value of gyroscope in the X-axis
print(gyroscope.get_y()) # Read the value of gyroscope in the Y-axis
print(gyroscope.get_z()) # Read the value of gyroscope in the Z-axis
print("------------------")
time.sleep(1)